-
×
 Third eye band for blind person with buzzer and led ready to use complete project kit || No assembly required
1 × ₹850.00
Third eye band for blind person with buzzer and led ready to use complete project kit || No assembly required
1 × ₹850.00
Subtotal: ₹850.00

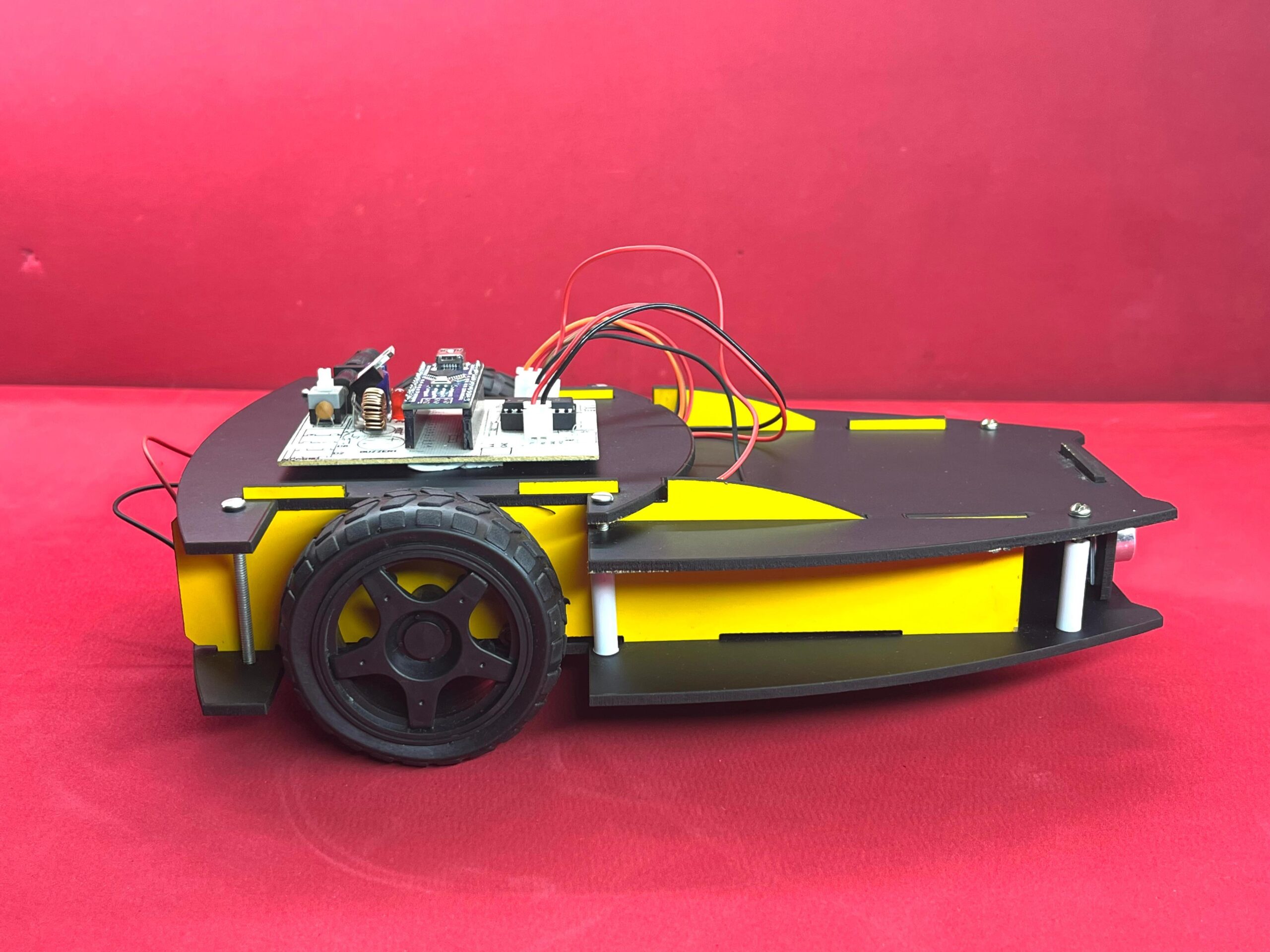
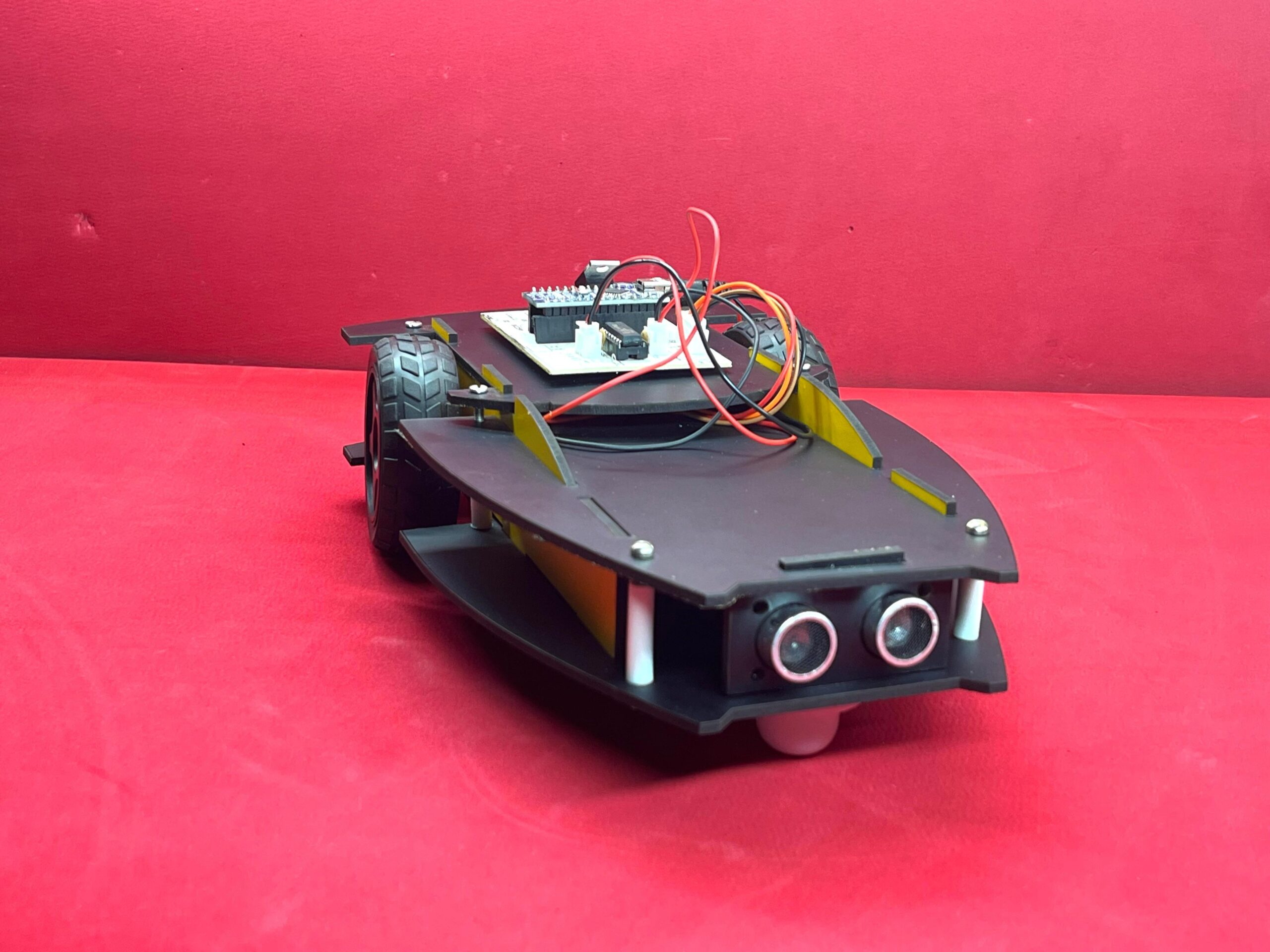
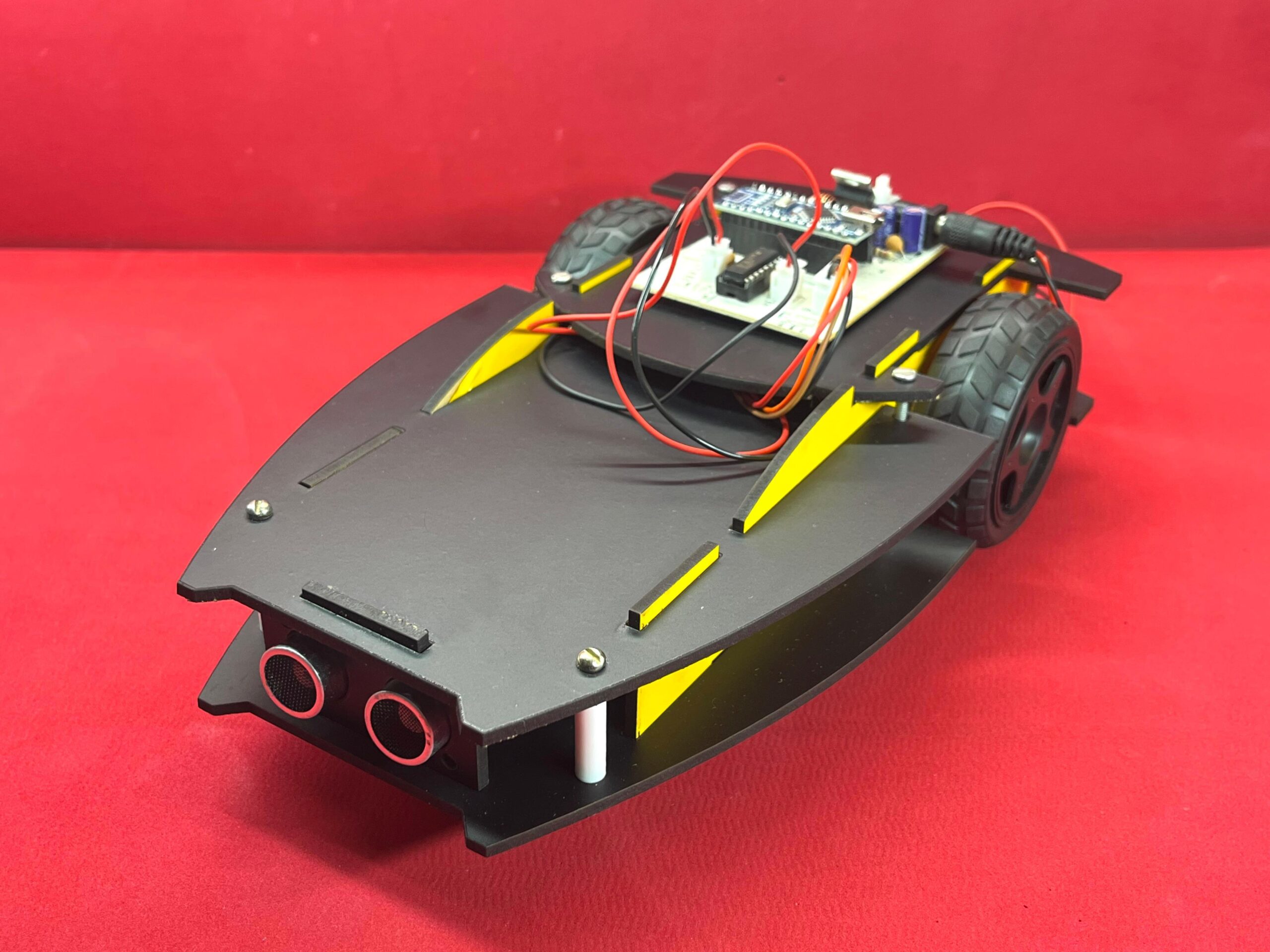
🧠 Intelligent robot that moves automatically and avoids obstacles in real-time
📏 Uses an ultrasonic sensor (HC-SR04) to detect nearby objects using sound waves
💻 Controlled by an Arduino Uno microcontroller which acts as the brain of the car
🔄 A servo motor rotates the sensor left and right to scan for clear paths
📊 Based on sensor readings, the car decides to move forward, turn, or stop
⚙️ L298N motor driver controls the left and right DC motors for smooth movement
🔋 Powered by a rechargeable battery pack (6V–12V)
🧰 Built on a robotic chassis with two wheels and one balancing caster
🧑💻 Programmed using the Arduino IDE in C/C++
❌ No remote control needed – it’s a completely autonomous system
🤖 Demonstrates basic principles of robotics, automation, and embedded systems
🚀 Can be upgraded with Bluetooth, WiFi, AI camera, or GPS
🔐 Real-life applications: self-driving cars, delivery robots, warehouse automation
📚 Great for science fairs, engineering exhibitions, school/college projects
🔄 Encourages understanding of sensor logic, decision-making, and motion control
💡 Teaches practical concepts in STEM: Science, Technology, Engineering & Math
🔧 Develops skills in problem-solving, coding, electronics, and innovation
🏆 A fun, educational, and impressive project for beginners and enthusiasts alike
₹1,999.00 ₹3,999.00
The Obstacle Avoiding Robot Car is an intelligent robotic system designed to move autonomously in an environment while detecting and avoiding obstacles in its path using ultrasonic sensors. It is based on the Arduino microcontroller platform, which serves as the brain of the system and processes input data from the ultrasonic distance sensor (HC-SR04), allowing the car to take real-time decisions based on surrounding conditions. When the robot detects an obstacle within a certain range, it immediately stops, measures the distances on its left and right by rotating the sensor using a servo motor, and then turns toward the direction that offers more free space. This makes the robot capable of navigating through complex environments without human intervention. The project integrates fundamental concepts from electronics, programming, robotics, and automation engineering, and is a basic yet powerful representation of how real-world autonomous vehicles like self-driving cars function. It demonstrates how sensors can be combined with logical programming to create machines that can perceive their environment and react intelligently. The robot’s movement is controlled using an L298N motor driver module connected to DC motors mounted on a chassis, while power is supplied through a rechargeable battery pack. The use of Arduino programming enables students and engineers to implement conditional logic, motor control, and sensor data processing all in one compact system. This project is not only educational but also scalable, as it can be further developed into more complex robots by adding features like GPS, Bluetooth control, artificial intelligence, machine learning, or camera-based image processing. It helps learners understand how smart machines operate and interact with the physical world, thereby encouraging innovation and hands-on experience in embedded systems and robotics. This type of project is often used in STEM education to introduce students to autonomous systems, and it aligns with the principles of Industry 4.0 where automation and intelligent machines play a key role in shaping the future of manufacturing, logistics, security, and transportation. The Obstacle Avoiding Car project offers practical experience in integrating hardware and software, solving real-world problems, and building systems that can make decisions on their own, making it an ideal project for science fairs, engineering exhibitions, and academic presentations.
| Weight | 1 kg |
|---|---|
| Dimensions | 30 × 18 × 8 cm |